Jake Brawer, Ph.D.

Computer science Ph.D. from Yale.
Postdoc at CU Boulder.
Social Roboticist.
ShelfAware: Semantic Particle Filter Localization with Low-Cost Sensors
Shivendra Agrawal, Ashutosh Naik, Dusty Woods, Jake Brawer, Bradley Hayes
Paper in progress, 2025
website /ShelfAware is a modular localization system for carts, wearable devices, or robots that operates in cluttered, symmetric environments like grocery stores. Using only RGB-D and visual odometry cameras, it fuses semantic classification and depth into a novel particle filter framework for robust pose estimation without relying on LiDAR or wheel odometry.
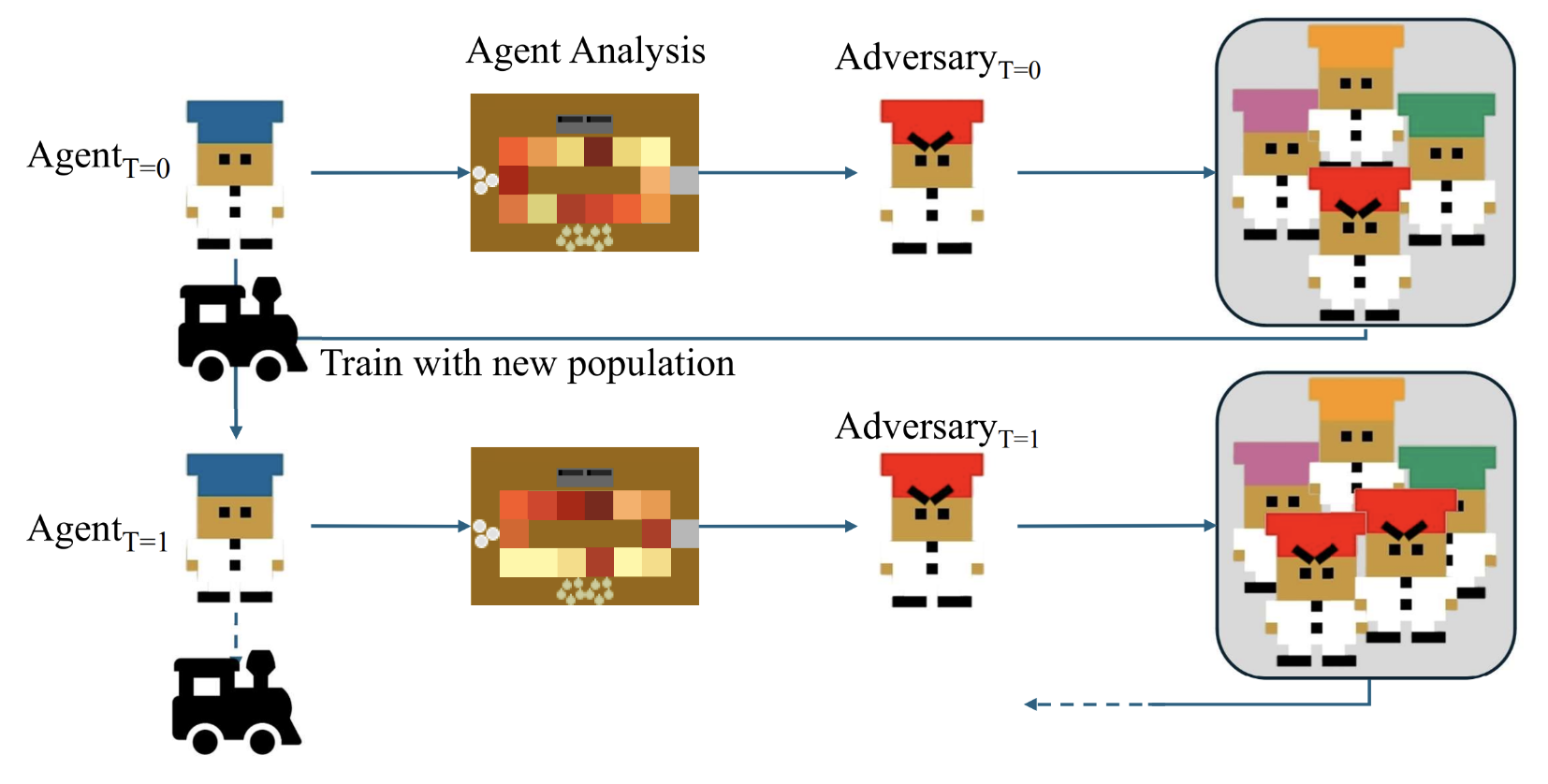
Cooperative-Adversarial Play (CAP)
Ava Abderezaei, Chi-Hui Lin, Joseph Miceli, Naren Sivagnanadasan, Stéphane Aroca-Ouellette, Jake Brawer, Alessandro Roncone
Paper in progress, 2025
We introduce Cooperative-Adversarial Play (CAP), a training method that improves zero-shot coordination by forcing agents to learn diverse strategies through adversarial teammate interventions. CAP enables agents to adapt to unfamiliar partners more effectively, especially in complex environments like Overcooked, outperforming existing approaches as coordination challenges increase.